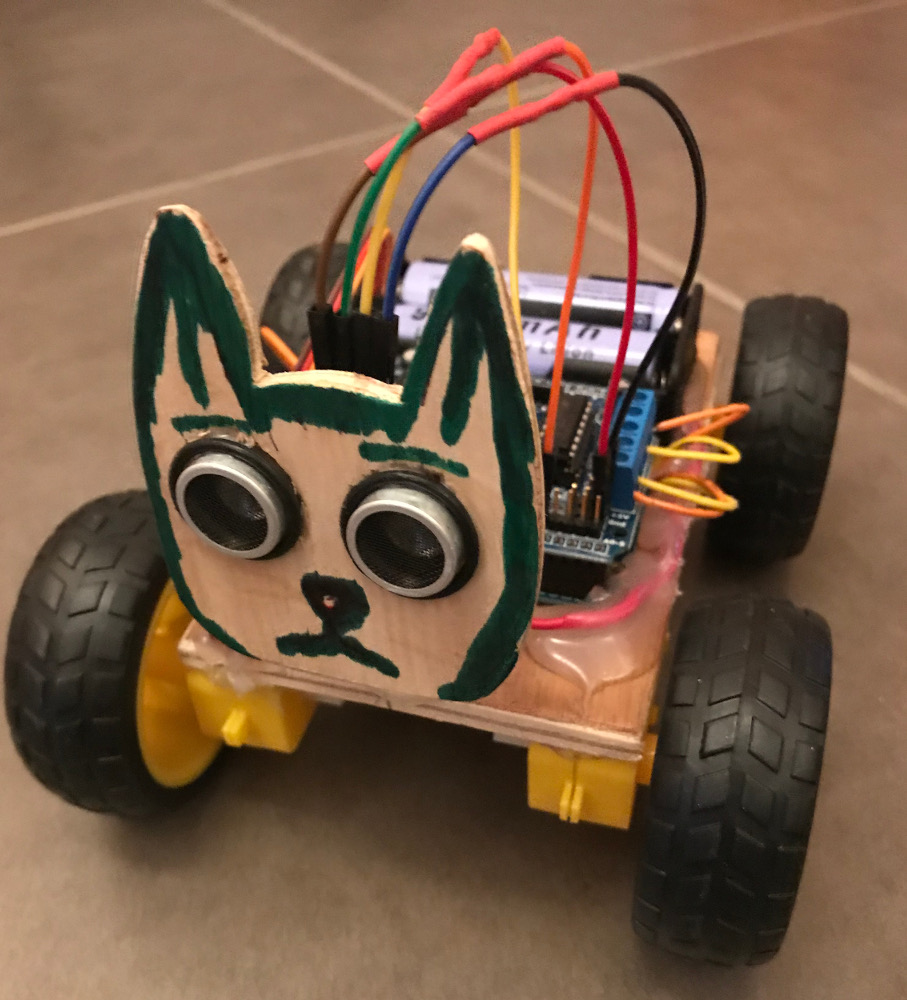
Un petit projet Robot 4 roues sur base d’Arduino.
Le code se trouve sur github
UltraSonic HC-SR04

Motor shield l293d
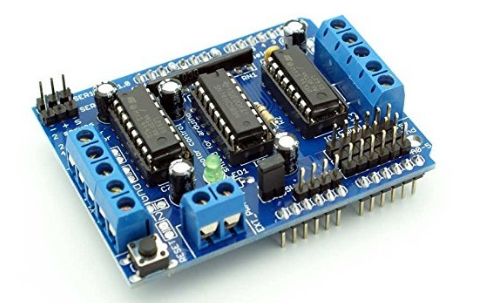
Utilisation des broches avec le Motorshield
- Les 6 broches d’entrée analogiques sont disponibles.
- Ils peuvent également être utilisés comme broches numériques
- De plus, I2C (A4 = SDA et A5 = SCL) peut être utilisé.
- I2C est possible, mais SPI n’est pas possible car ces broches sont utilisées.
- Broches numériques 0-1 : TX / RX: Entrée / sortie série
- Broches numériques sont utilisées: 3,4,5,6,7,8,9,10,11,12
- 00: TX / RX Serial port
- 01: TX / RX Serial port
- 02: Free
- 03: DC Motor #2 / Stepper #1 (activation/speed control)
- 04: Drive the DC/Stepper motors via the 74HC595
- 05: DC Motor #3 / Stepper #2 (activation/speed control)
- 06: DC Motor #4 / Stepper #2 (activation/speed control)
- 07: Drive the DC/Stepper motors via the 74HC595
- 08: Drive the DC/Stepper motors via the 74HC595
- 09: Servo #1 control
- 10: Servo #2 control
- 11: DC Motor #1 / Stepper #1 (activation/speed control)
- 12: Drive the DC/Stepper motors via the 74HC595
- 13: Free –> connected to LED
Bluethooth HM-10
Le module HM-10 Maître et esclave Bluetooth 4.0 est compatible avec iPhone et iPad
Voir toutes les explications sous cet article